NT2025プロジェクトとは
2025年までに都筑ブランドの製品化を目標としたプロジェクトです。
NTは「NEXT TSUZUKI」 の略称であり、「市場ニーズにあった製品を市場投入するため、 マーケティング手法を取り入れ、開発を行う」「 製品開発に伴うノウハウ・知見を社内に蓄積する」を目的に2017年からスタートしました。
NT2025プロジェクト発足から現在までのダイジェスト
-
- 2017年度
- NT2025発足/製品案の創出/福祉、介護分野機器の構想(試作1号機)
-
- 2018年度
- 試作1号機開発(仕様決定、設計着手/部品製作、試作手配、組立/社内試験実施)
-
- 2019年度
- 試作1号機開発(ユーザー試験実施/都筑まつりにて試作機試乗会実施)、製品案アプローチ手順書作成、情報収集
新規自社製品へアプローチを実施
-
- 2020年度
- 製品企画審査を経て野菜収穫ロボットの開発に決定/開発に着手
座談会メンバー
-

代表取締役社長 栗田有樹 -

経営企画室 菊地哲也 -

Next Tsuzukiグループ 吉池康彦 -
Next Tsuzukiグループ 福原健太 -

Next Tsuzukiグループ 立山祐樹
プロジェクトチームから正式に社内グループに
インタビュアー 新しいメンバーがいらっしゃいますね。自己紹介をお願いします
福原
岡山県出身で愛媛大学でAIを使った文書処理、自然言語処理を研究していました。都筑製作所がこれから画像認識を手がけるということで、自分がその方面に興味があったことと、自分が働ける場があるのであればと思って、2020年6月に入社しました。
立山
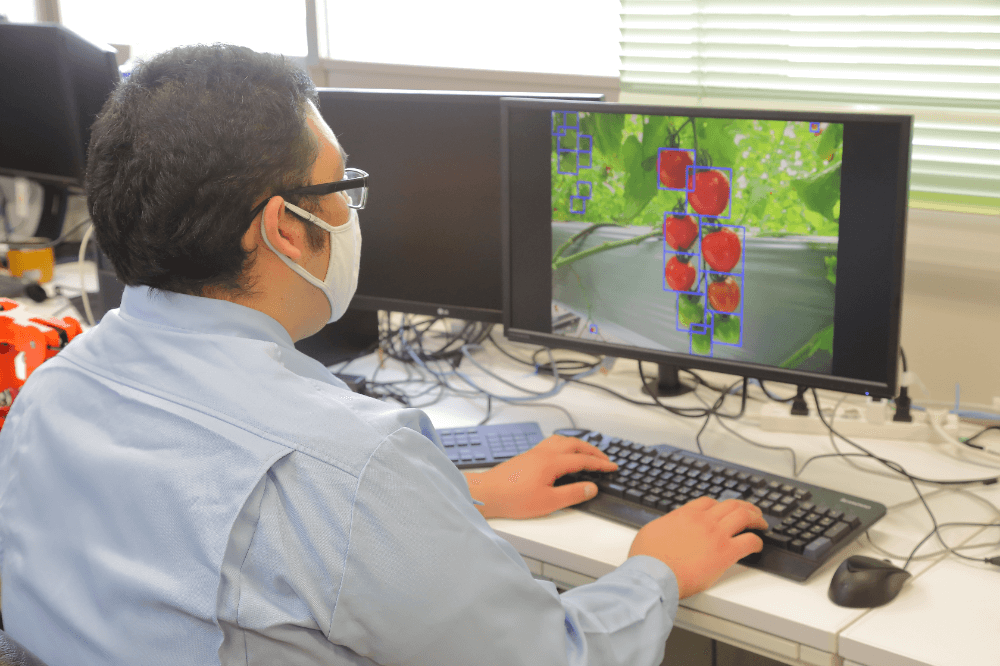
私は広島県から来ております。大学も福原さんと同じ愛媛大学で情報工学を研究していました。彼と同期になります。都筑製作所でAIの求人があるという話をいただいて、自分の力が活かせる場所があるならと思って入社しました。会社の中でAIの第一人者になれるかもしれないという気持ちで始めています。今はディープラーニングでAIにミニトマトの画像を何千枚も覚えさせています。
栗田
NT2025というプロジェクトだけでなく、開発課という部署も2020年に正式に発足しました。そこでもAIを活用して画像認識装置やバリ取り装置を製作し、量産ラインにフィードバックする取り組みを始めています。
NT2025はこれまで社内プロジェクトとして有志を集めて部署横断的に進めていましたが、やるべきことの専門性の高まりを受け正式な組織として菊地さんが室長を務める経営企画室の中にNext Tsuzuki グループを設置し、吉池さんにグループリーダーとなってもらいました。福原さんと立山さんと、もう一人2021年4月入社の新卒の方がこのグループに入る予定です。
吉池
今回取り組んでいる収穫ロボットは技術要素が多彩で、その上、社内にはない技術が沢山あります。ですから、一から開発していくというのは2025年という区切りを考えるとかなりタイトなスケジュールだなと思っています。笑
栗田
前回の福祉・介護分野機器の開発はプロダクトアウトでした。社内に開発という機能がまだなかったので、まずは自分たちのやりたいことをやってみようという考えで進めたものです。2019年の『都筑祭り』でNT2025試作1号機(シニア向けの自操用電動車イス)をお披露目して、それは完結となりました。
そこで得た知見を活かし、今回はマーケットインで市場や事業性を考えるところからスタートしてもらいました。2025年をゴールとした開発フローも吉池さんに組んでもらい、目指すところに向けて動き始めています。
ミニトマト収穫ロボットに決まるまで
インタビュアー どのような過程で野菜収穫ロボットの開発に決まったのでしょうか
吉池
2019年の夏から年末まで私と菊地さんとで市場調査と製品アイデアの案出しを行いました。市場調査はけっこう徹底的にやりまして、100件を超える製品案を出した上で絞り込みをしていき、2020年3月にアグリビジネスに着地しました。
菊地
製品案は合計107件出しました。「既存市場」「既存で未着手市場」「未開発市場」「誘導型市場」「SDGs関連市場」の5つの分野で考え、小型モビリティや自動運転など様々な切り口で製品案を考えました。そこでは『水中ドローン』や『加温冷却機能付き水筒』といったアイデアも出ましたね。そのテーマ設定のひとつにアグリカルチャー、農業支援もありました。案を出しては市場を見ながらふるいにかけていきました。
その過程で残った製品案が、湾岸設備の老朽化を見据えたインフラ調査用の水中ドローンと人手不足からなる農業支援収穫ロボットです。その2つのテーマを最後は徹底的にマーケティング調査しました。
インタビュアー どちらも魅力的なテーマですが、農業支援に決めた理由は何だったのでしょうか
吉池
理由は二つありました。水中ドローンは資格がいろいろ必要なことがわかりまして、農業はそういった資格が必要ないということがまず一つ。二つ目がちょうどその時期に、弊社のグループ会社が農業法人を立ち上げるという流れがありましたので、それが結びつきました。
農業支援をテーマに決めて、役員提言を数回重ねて、ミニトマト収穫ロボットで本決まりになったのが2020年の4月です。
インタビュアー 農業法人について教えてください
栗田
社名は『株式会社夢サイバー』といいます。
サンゴを使った水耕栽培の特許を持っている大学教授との繋がりがあり、AIでコントロールした養液を流してミニトマトを育てるという栽培方法で、すでに試験栽培を始めています。
法人登録は2020年5月ですが、夢サイバーの設立計画はそれ以前から進んでいたので、農業支援ロボットと夢サイバーのシナプスが繋がったという感じですね。
吉池
トラクターや大型農機は大手メーカーさんには敵わないので、いろいろ市場調査していく中で小型の収穫ロボットに辿り着きました。
栗田
『株式会社夢サイバー』は3つの想いから生まれました。一つ目はこれからの農業人口減少を踏まえ、自給率維持に貢献をしたいという想い、二つ目はコロナ禍の体験を通じて「食べること」に貢献したいという想い、三つ目は弊社のグループである株式会社JSテックが保有する一万平米の土地を有効活用したいという想いからです。さらに、全てがロボットで収穫できるわけではないので、地域の雇用にも貢献できるのではという想いで設立しました。
吉池
夢サイバーでの収穫作物はミニトマトなので、市場調査をいろいろ重ねました。
人を集め、開発環境を整える


インタビュアー 福原さん、立山さんにお声がかかったときは「農業支援ロボットの開発」「ミニトマト」というテーマ設定が完了していたということでしょうか
福原
はい。それでお声がけいただきました。ミニトマトはだいぶ小さいので、難しそうだなと思いました。笑
吉池
2020年の春から人材獲得に動き始め、まずは「物体検出」と「空間認識」のテーマで募集を始めました。弊社は製造業なのでハード系の人材は揃っているのですが、ソフト系の人材はやはり集めなければいけないので。
栗田
テーマが農業支援ロボットの開発に決まったと同時に吉池さんからソフト系の人材獲得もせかされました。笑
菊地
物体検出と空間認識を福原さん、立山さんに取り組んでもらうためにも外部のAI専門家が必要ですので、信州大学工学部の小林一樹先生にご協力いただけるようにしました。「インタラクションデザイン」と「アグリテック」の専門家です。
福原
遠慮なく質問してくださいと小林先生に言っていただけて、コロナ禍になる前は工学部にも訪問して現状の課題の相談などもできる環境を作っていただきました。
立山
AIを作る上での基本的なところであったりとか、単純な位置の検出だけでなく、トマトの向きなどをAIで判別するための質問をしたり、一緒に考えてくださったりとご協力をいただいています。
吉池
先ほどハード系の人材は揃っているとは言ったのですが、社内の既存部署から引っ張ってくるわけにはいかないので、その人材集めも今後の課題です。それと、福原さんと立山さんに画像解析の仕事をしてもらっているのですが、実は画像解析は多岐にわたる領域ですのでこれからも人材は募集していきたいと思っています。2021年4月に新卒で入社する方はモーションプランニングといってロボットの動作経路を担当してもらう予定です。
2025年に向けたスケジュール
インタビュアー 2025年に向けてどのようなスケジュールになっているのでしょうか
吉池
これから3年間は『基礎開発』を予定しています。収穫ハンドやロボットアームの選定、画像認識モデルの構築などです。その次の2年間は『基礎応用』で基礎開発の精度向上がテーマになります。そして、2025年には量産機の初号機を製造し、夢サイバーへの納入を目指しています。そこからはスパイラルアップで初号機の改良を進め、2027年には量産機の最終型に至りたいと考えています。今は原理検証が終了した段階で、2021年4月から『基礎開発』がスタートする予定です。
菊池
今は収穫の仕方について「物体検出」と「空間認識」の領域で取り組んでいる段階です。
福原
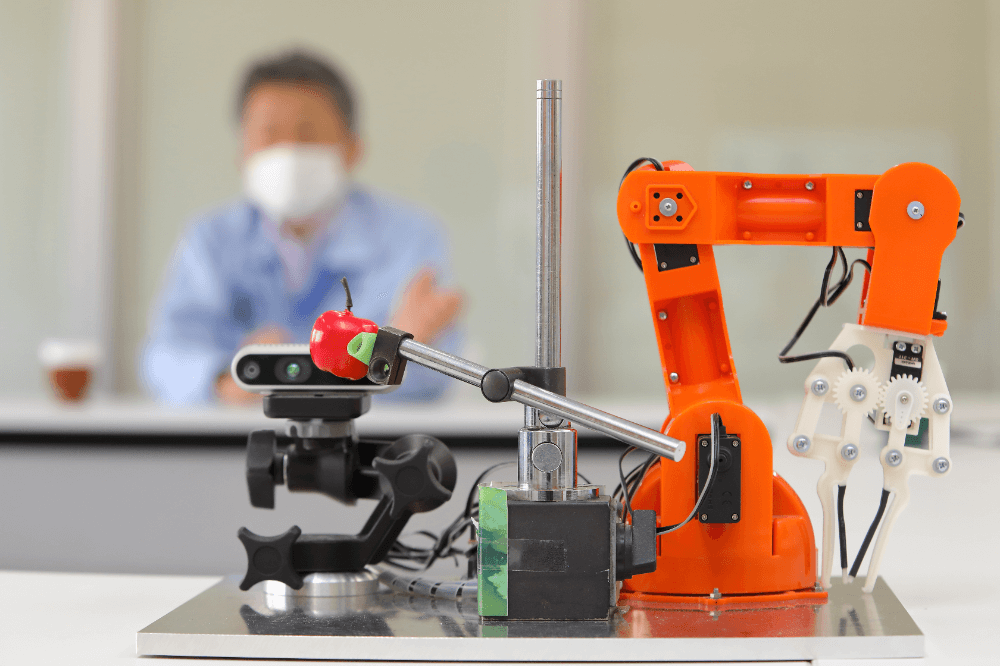
カメラの画像から点群(x, y, z)の座標軸を取得して、収穫できるように取り組んでいます。今後の方法論ではカメラが複数台になることもあるかもしれませんが、今は1台のカメラ画像で始めています。
吉池
美味しい時期のトマトを美味しさを保って収穫するというのがロボットの目的です。「美味しいトマト」の判定。「傷をつけない取り方」の経路判定。それぞれ技術的な要素が違うので、それを基礎開発の段階で進めていく予定です。
栗田
美味しいトマトの知見を得るためにも「トマトの成り方」はもっと学ばなければいけないと思っています。それは農業法人の方で研究を進める予定です。どのトマトも全部美味しいんですけれど。笑
吉池
ミニトマトの収穫ロボットは大手メーカーさんも開発されているので、弊社では「選ばれる理由」を懸命に構築していかなければなりません。もちろん規模も資本力も違うので、あれもこれもできるではなく、検討していきたいと思っています。
栗田
どこに着地点を見出すかが大切です。幸い『夢サイバー』というマーケットインの先があるので、そこで実際に使用することでより高い精度にブラッシュアップして、いずれは量産機を多くの農園に採用していただきたいと思っています。
プロジェクトの課題とこれから
福原
現状の私たちが持っている知見ではまだ見えない点が多岐に渡るので、これから調査などを進めていかなければと思っています。
立山
できるところから一つずつコツコツ進めていこうと思っています。
インタビュアー これから待っている困難さを分かりやすく例えるとどんな感じでしょうか?
福原
プールでしか泳いだことがないのに、海に連れてかれるみたいな感じでしょうか。それはちょっと違うかな。笑
菊池
例えばいま取り組んでいるロボットだけど、現段階で人間で例えると何歳くらい?
福原
そうですね。小学一年生くらい…でしょうか?
立山
小学校には入ったよね。
菊地
小学生から更に成長させるには、美味しいトマトを見分ける知識とか、効率良く収穫する技術とか、傷を付けずに収穫する術とかをこれから身につけなければいけないですね。
インタビュアー それでは最後にこの一年間の時間の使い方や目標をお聞かせください
吉池
細かな話でいったら、必要とする各技術について論文等を参考にしながら技術を深めることが必要。また実際の圃場でテストを行うことが目標です。最終ステップまで計画は立てていますが、実際のテストを重ねることで(必要技術の)変化や課題を具現化していく大切な時期だと思っています。
福原
やっぱり実圃場で収穫をするということがこの一年でできていなければと思っています。そのための物体検出がこの一年でできるかどうかが目標ですね。実圃場ということはロボットが今より大型化するということなので、知能もそれに対応していかなければと考えています。
立山
現状は物体検出ができているといっても「白い画用紙に刺さった赤いピンを見て、トマトと認識して指を指す」くらいのレベルですので、今後収穫するためには「右から手を入れるのか、左から手を入れるのか」「同じトマトでも熟しているのはどちらか」「密集したトマトを潰さないように収穫する方法」といったことが判断できる賢いAIにしてあげなくてはと思っています。特にこの一年でいえば、トマトを穫る向きの判断ができるようにしたいです。
菊地
基礎開発から入っていく段階ですが、彼らは技術者ですから色々なことがやりたくなると思うんですね。それを進める中で最終的には量産時に採算が合うように、また、マーケットインでお客様に使っていただける製品にしなくてはいけない。そういう基礎開発をしていかなくてはと思っています。私はそこを一番気を使っていく役割ですね。お金ではなくて知恵をどう出すか、それをこれからも続けながら開発を進めていきたいと思います。
栗田
菊地さんと吉池さんがしっかり計画を描いてくれましたので、それに沿って粛々と進めてもらえるように経営者として判断していければと思っています。お金や人材の話もそうですね。もう一つはこのチームで得られた知見を社内にフィードバックすることも大切です。それは菊地さんの仕事になると思うのですが(笑)。そういう水平展開を目指しているのが2025VISIONで掲げた「開発提案型メーカーになる」という要素の一つです。
ここにいるメンバー皆さんは開発に専念してもらい、菊地さんには全体のマネジメントと社内展開をがんばってもらえればと思っています。
「2025年VISION」を話そうVol.1(2017年)を見る